解决方案








关闭

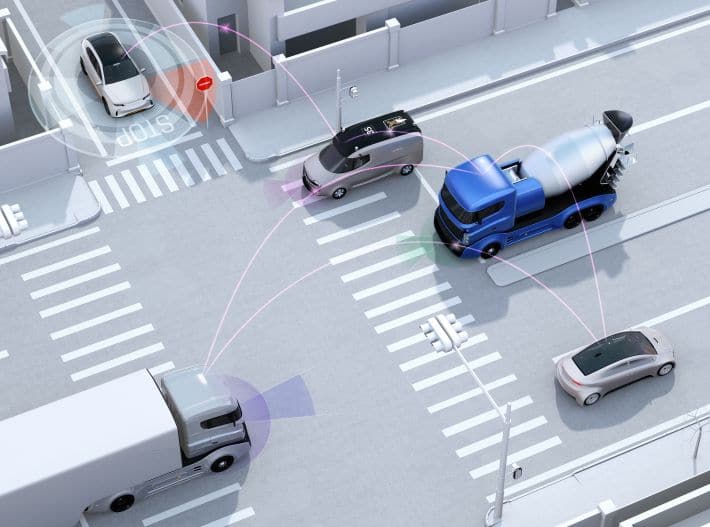
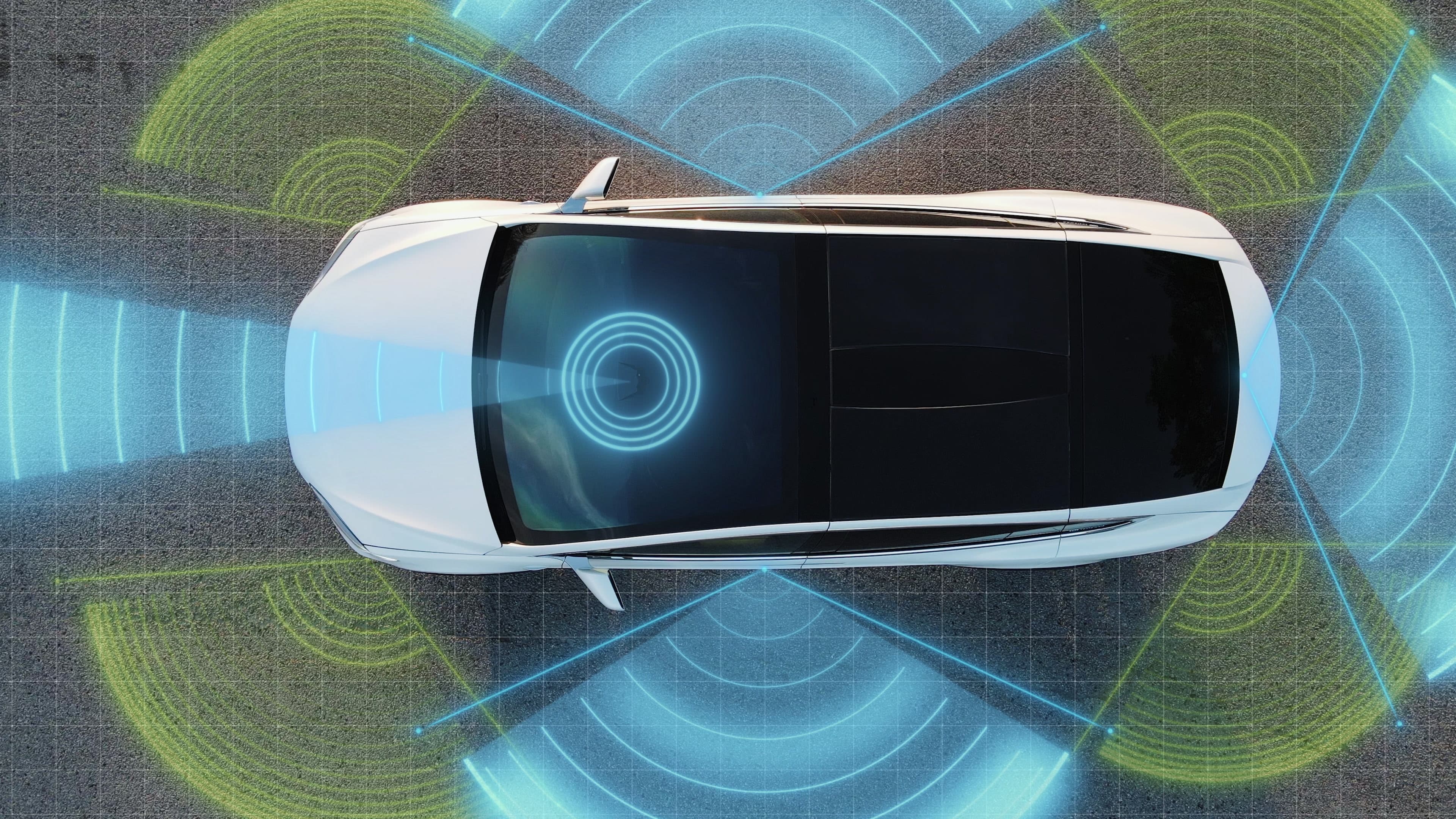
自动驾驶
高级驾驶辅助系统(ADAS)/自动驾驶(AD)的开发在整个过程中需要大量的数据。昆易电子致力于通过提供全面的解决方案和服务,包括数据记录、数据回放、系统模拟和验证,来帮助客户打造更可靠、更先进的产品。
查看详情
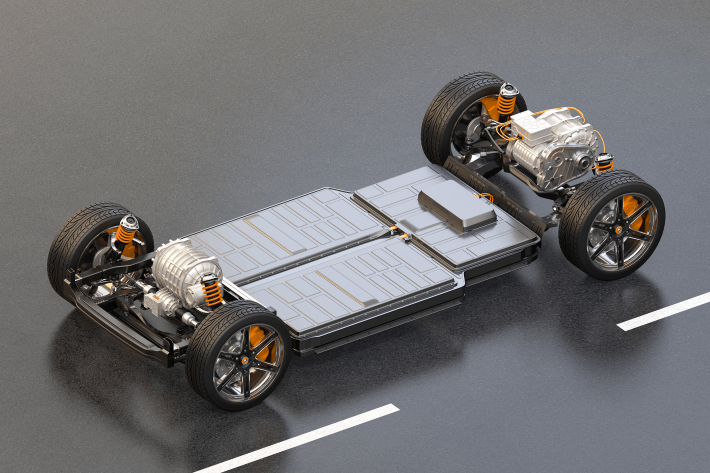
电力驱动
昆易电子在汽车动力系统的研发与测试领域中凭借与行业内多家客户的紧密合作,不断追求卓越与创新。在发动机管理、变速箱控制、电池管理以及电机电控等多个核心系统,昆易电子均为客户提供了一站式、全方位的测试解决方案,为客户带来更加卓越的产品体验。
查看详情
智能座舱
随着汽车芯片、人机交互、汽车系统等软硬件技术水平快速迭代,昆易电子凭在智能汽车领域多年积累与全栈自研的实力,在智能座舱测试、驾舱一体测等方面提供一系列前沿的测试产品及定解决方案,帮助工程师高效完成任务。
查看详情
车身
车身域控制器作为车身主要部件的控制大脑,其性能与稳定性对于整车的安全性与可靠性至关重要。基于这一需求,昆易电子整合了研发、测试、试验团队资源,推出了高效且通用可靠的车身域自动化测试解决方案。
查看详情
底盘安全
如今,汽车的底盘系统越来越智能化,其系统通信和功能的复杂度也越来越高。昆易电子针对这一趋势,推出了一系列解决方案,覆盖转向、制动及悬架等,帮助工程师在有限的资源内对复杂的底盘控制系统进行各项测试验证。
查看详情
车载网络通讯
车载总线,作为汽车数据通讯的核心,对于确保信息的精准、实时、安全传输至关重要。为满足对总线系统可靠性与安全性的高标准要求,昆易电子针对CAN/CANFD、LIN、FlexRay及车载以太网等多种总线系统,提供了一系列先进的测试解决方案,旨在优化车辆通信系统的整体性能。
查看详情
整车测试
整车测试是一个综合性的评估过程,它涵盖了汽车从设计到量产上市前的一系列严格而复杂的试验。昆易作为行业领先的解决方案提供商,针对整车测试的需求,提出了一系列创新而高效的解决方案,涵盖了从测试设备研发、测试流程优化到数据分析处理的全方位服务,为整车测试提供了强有力的技术支撑和保障。
查看详情
院校科研
在院校科研从传统理论知识领域向智能网联、新能源等前沿领先研究领域转型的关键时期,昆易积极应对挑战,推出科研、实验室共建、竞赛实训等一系列解决方案,量身打造一系列工具供教育专家使用,助力学生和研究人员高效剖析问题,加速探索创新进程。
查看详情
DV耐久测试/EOL下线刷写
我们不仅提供业界领先的测试系统,更提供包括EOL检测、DV耐久测试以及ECU刷写等在内的个性化、全方位解决方案。无论您是进行基础研究还是新产品研发,昆易电子都能为您提供精准、高效的解决方案,助您实现技术上的飞跃与创新。
查看详情
没有找到合适的解决方案?
立即咨询
产品
关闭
硬件在环
数据记录
软件
网络通讯
ECU刷写及诊断
HIL SYSTEM
硬件在环测试系统
REPLAY HIL
智驾数据回灌平台
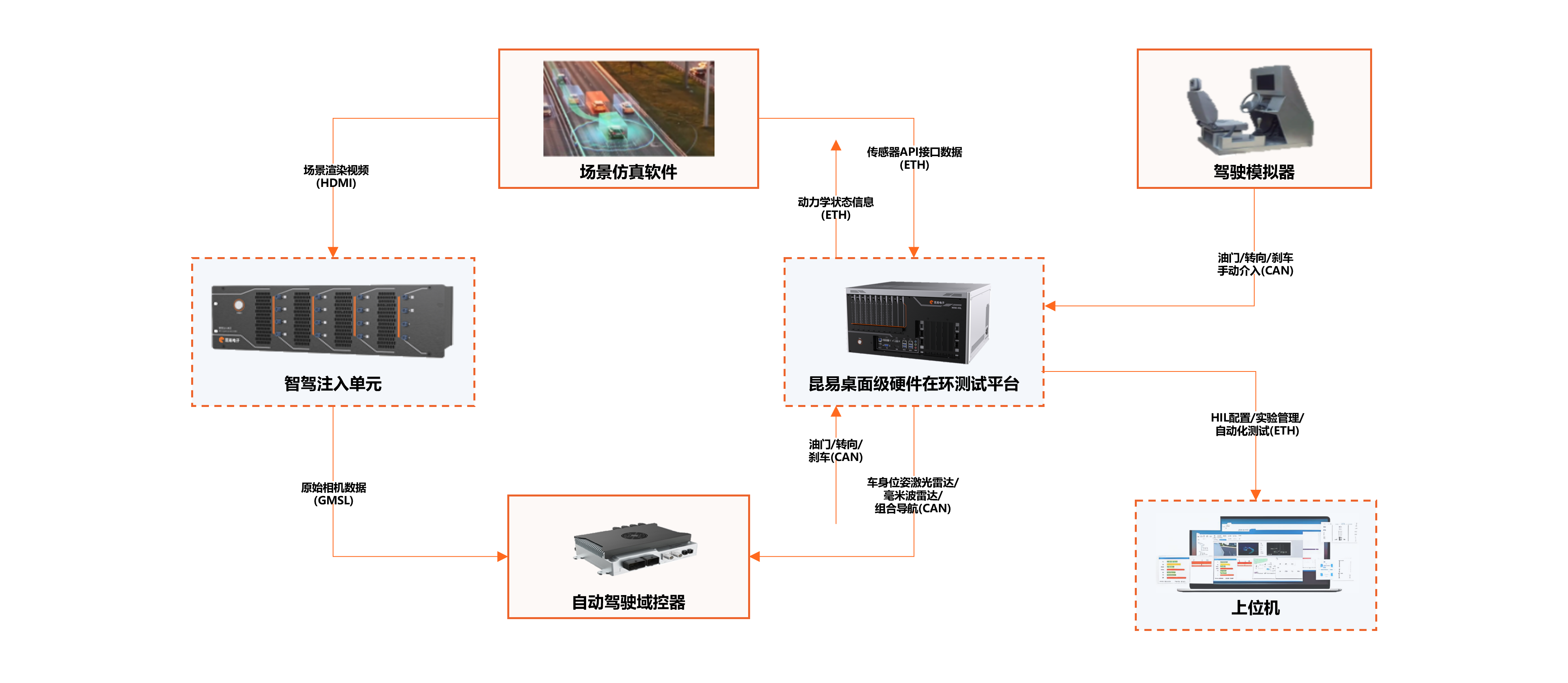
MINI HIL
桌面级硬件在环测试系统
AUTOMOTIVE CAMERA INJECTION BOX
相机视频注入盒
CUBESTACK
集群测试系统
Rapid ECU
快速原型控制器
SmartRocket PeneX
汽车网络安全测试系统
AD STATION SERIES
自动驾驶场景采集记录仪
VGATE SERIES
总线记录仪
C MODULE
数据采集模块
VCAR GMSL BYPASS
视频旁路采集模块
VIDEO BOX
视频采集模块
VCAR DAS
总线仿真分析软件
adSoft
ADAS 功能测评软件
vgSoft
记录仪可视化软件
vgConfig
记录仪配置软件
WEB MANAGEMENT
WEB 云管理平台
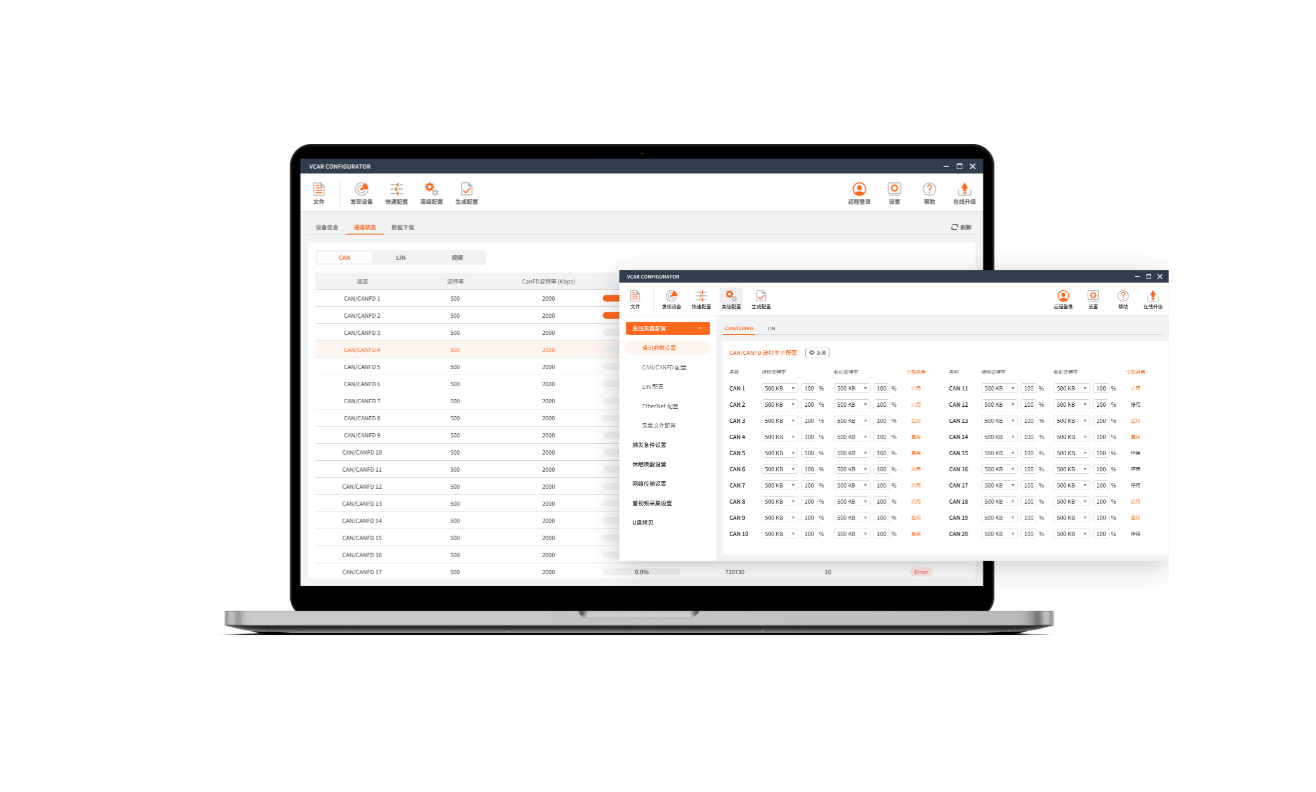
VCAR EM
工程配置软件
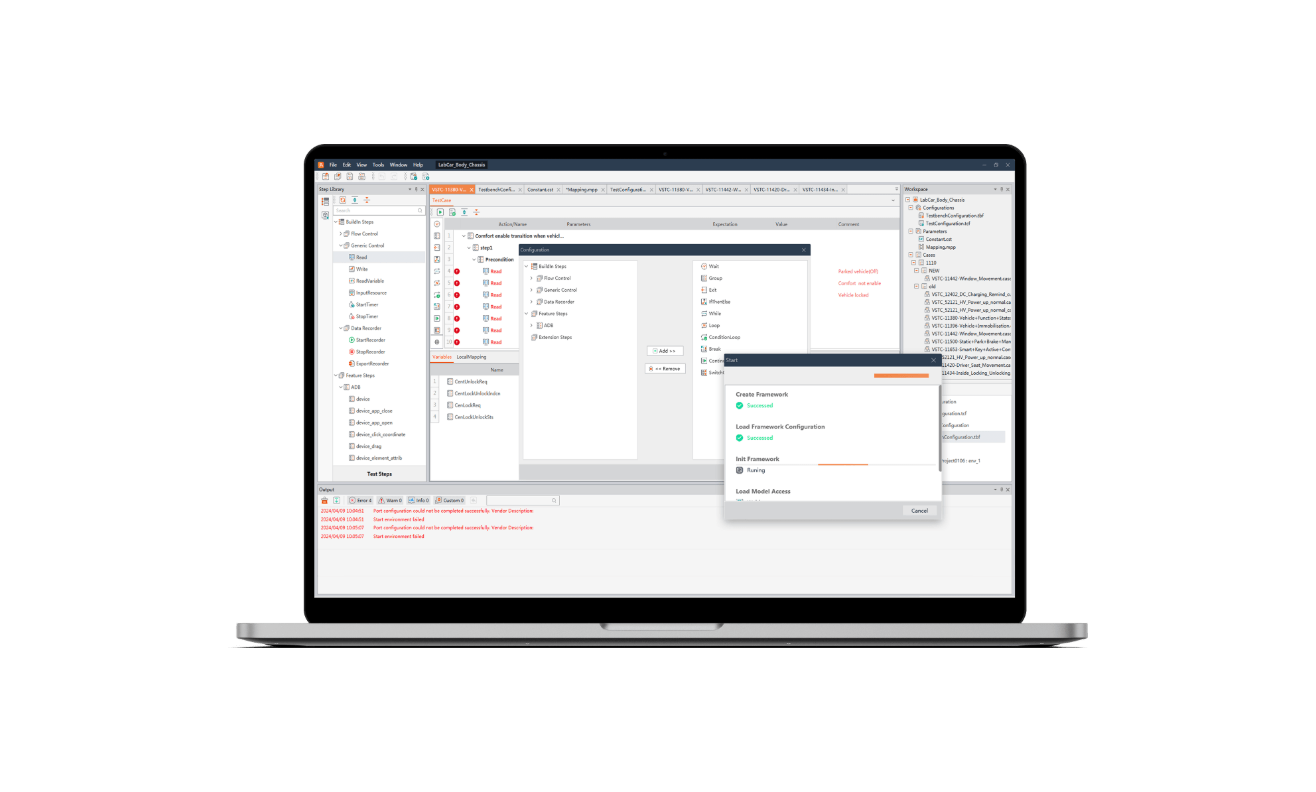
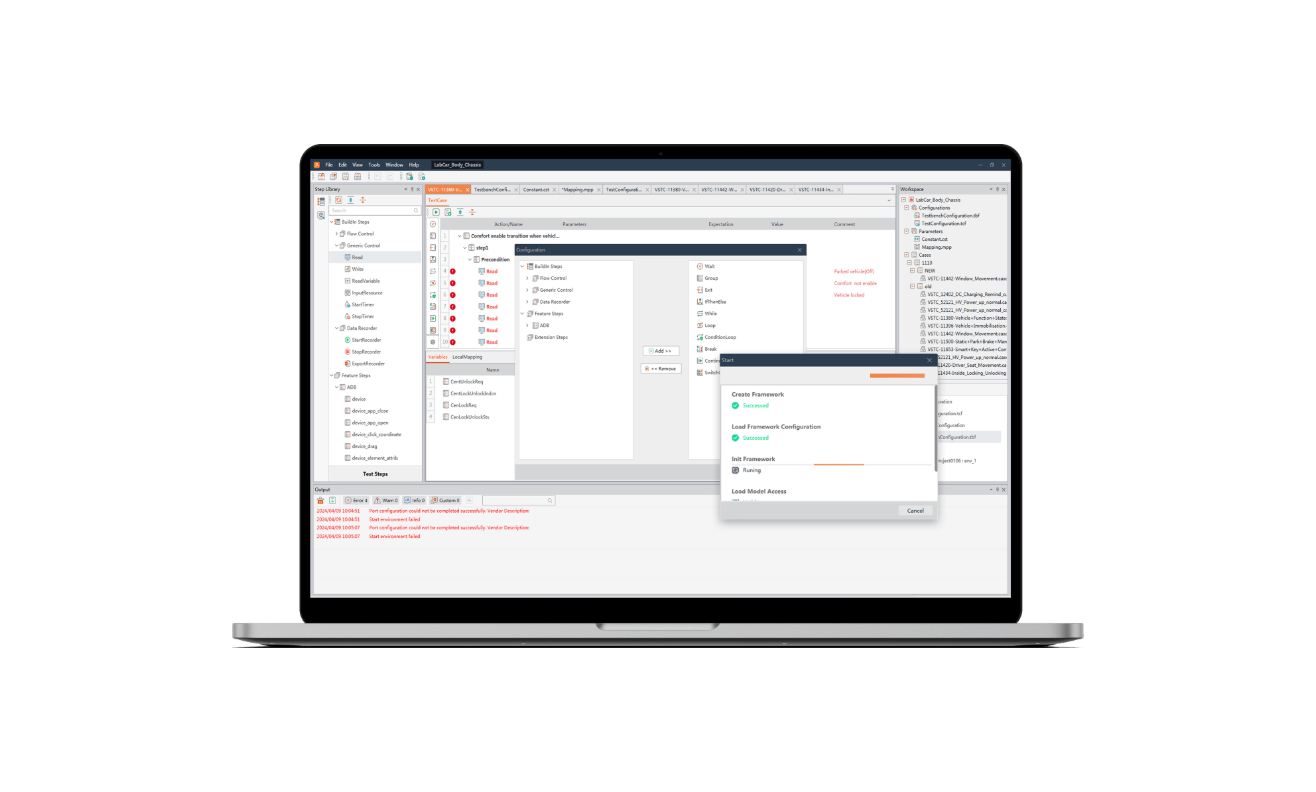
VCAR EA
自动化测试软件
VCAR MCD
控制器分析标定软件
SmartRocketTestGrid
嵌入式软件自动化测试平台
ECU Flasher
ECU 刷写工具
OBD TESTING SYSTEM
OBD设备





















没有找到合适的解决方案?
立即咨询





HIL SYSTEM
VCAR DAS
REPLAY HIL
AD STATION SERIES
VGATE SERIES
AUTOMOTIVE CAMERA INJECTION BOX
MINI HIL
CUBESTACK
Rapid ECU
C MODULE
VCAR GMSL BYPASS
VIDEO BOX
adSoft
vgSoft
vgConfig
WEB MANAGEMENT
VCAR EM
VCAR EA
VCAR MCD
VCI SERIES
VBE SERIES
VIT
KY-A2B
ECU Flasher
OBD TESTING SYSTEM
SmartRocketTestGrid
SmartRocket PeneX

联系我们